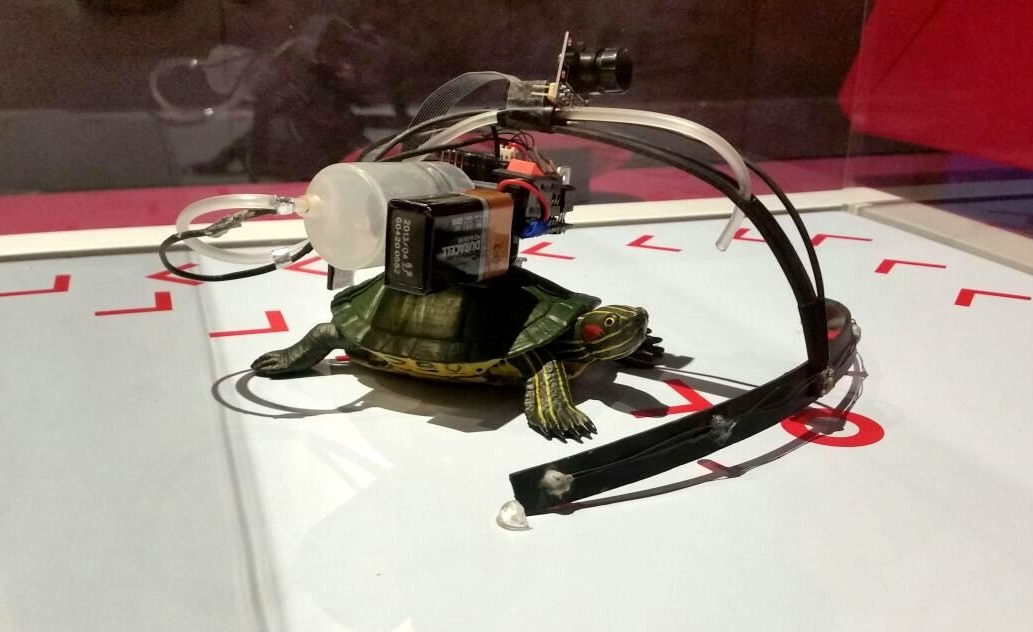
A lantern-like head device sits atop the carapace of a turtle, shining five LED lights in the reptile’s field of vision. One of the LED lights flashes; the turtle turns to swim in the direction of the light, and gelatin pudding comes out from a tube connected to its mouth. After several repetitions of this process, the turtle succeeds in navigating through a designated path.
Dr. Dae-Gun Kim, a researcher at the KAIST Computational Mechanics and Structural Systems Lab and the developer of this device, calls it a “Parasitic Robot”. In May, he published a paper titled “Parasitic Robot System for Waypoint Navigation of Turtle” in the Journal of Bionic Engineering. This animal-robot hybrid system applies animal locomotive abilities to robotic tasks, which “could provide an alternative solution to some of the limitations of conventional mobile robot systems in various fields, and could also act as a useful interaction system for the behavioral sciences.”
Robots instead of humans as turtle trainers
The parasitic system is inspired by animal-parasite relationships in nature, and controls the movement of a turtle in a desired direction, much like how horsehair worms manipulate their hosts to lead them to water. No chip is implanted in the turtle’s body, nor is the turtle connected in any way to a human. Everything is done solely by the palm-sized robot attached to the turtle’s back.
The composition of the robot is simple: the main body, LED lights, and a food feeder. It does not have a motor nor any wheels to let it move on its own, but instead relies fully on its host turtle for locomotion. In the main body, a turtle control program, which turns the lights on and off to indicate the direction in which the turtle should move, is implanted. Every time the turtle moves in the indicated direction, it is given a tasty food reward from the feeding tube. The accuracy of the turtle’s response increases as this pattern is repeated. Based on Skinner’s theory of operant conditioning, which states that behavior can be modified through positive and negative reinforcement, five turtles were trained over a course of five weeks. Eventually, they learned to associate moving in the direction of the light with the reward, and the robot was able to guide them through a five-meter course in 75 seconds on average.
Past studies have attempted to control fish and insects through chip implantation, or to create robots mimicking animal bodies. Dr. Kim’s system is the first in the world to independently control an animal, moreover a turtle, in a parasitic manner.
Potential use in future mobile robot systems
Through sophisticated biological mechanisms, animals are capable of smooth movement. However, despite great advancements in technology, robots cannot imitate that smooth movement. For robots that operate in rough environments, the limitations in movements are even greater. The challenge is to create robots that can be stably put in motion in natural settings, and the parasitic robot system may be the key to overcoming that hurdle. Dr. Kim said that animals other than turtles, such as mice, birds, and fish, could perform as well as the turtles on the tasks. In the future, the parasitic system could be applied to a wide variety of animals for appropriate use on reconnaissance or rescue missions that humans cannot carry out on their own.
However, there are many hurdles to be overcome before this system can be used for real-world problems. The robot’s influence on the turtle’s attention is quite limited, and the turtle is easily distracted by extraneous stimuli. Future work will involve creating a more immersive system for a precise control of movement.
Attention from foreign media
Ever since its publication, Dr. Kim’s paper was featured in several foreign news outlets such as The New York Times, Reuters, and IEEE Spectrum. New Scientist was the first UK magazine to interview Dr. Kim. Last June, after the story was published in the UK, the London Science Museum contacted Dr. Kim to display the parasitic robot in their Tomorrow’s World gallery, where the most surprising and groundbreaking science stories are exhibited.
“I think foreign media recognized the originality of the idea of recognizing and reinforcing animal behavior to induce specific movements,” said Dr. Kim. “Though it is very important to follow a stable path or mainstream research, I think it is also necessary for a researcher to take on challenges completely unheard of. I believe that in the end these efforts will converge to become the key that opens up the next era in science.”